NOTICIAS
24.01.2025
¿Se podrían construir Máquinas de Pilaf en la vida real? ¡Le preguntamos a un desarrollador de robots pilotables todo sobre ello!
Mucha gente sueña con pilotear un robot, por lo que es natural que haya un montón de obras diferentes que retraten sus propias versiones de este tipo de robots, como las Pilaf Máquinas de Dragon Ball.
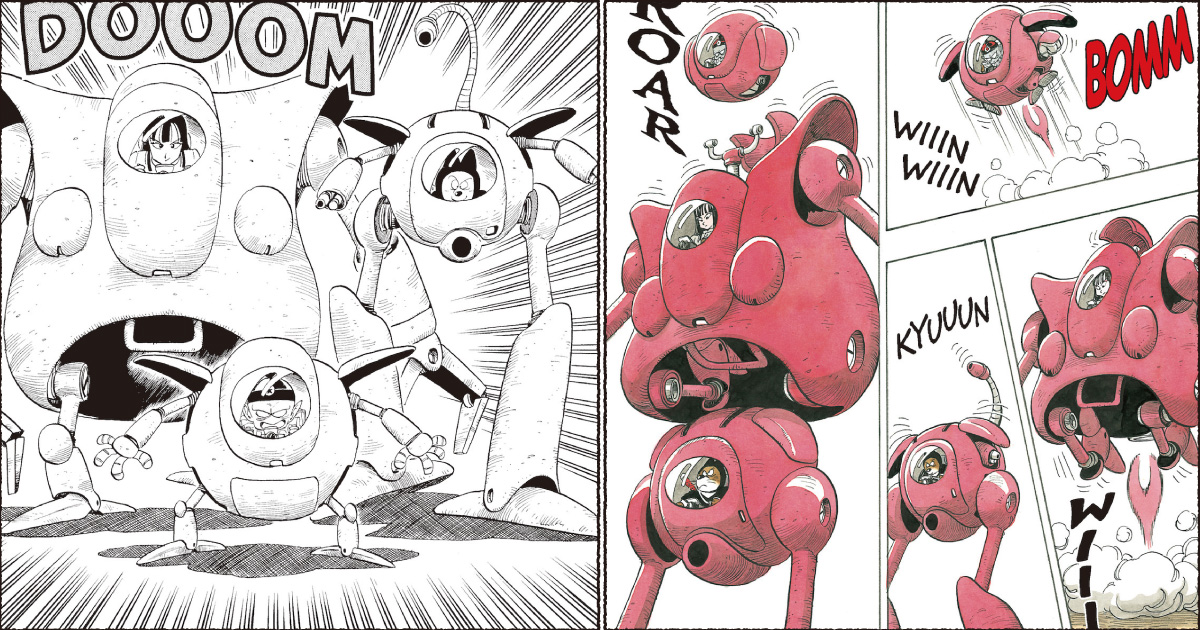
No te dejes engañar por su diseño redondo y adorable; ¡ las Pilaf Máquinas son robots potentes y multifuncionales que, según se dice, fueron desarrollados por el mismísimo emperador! No solo están equipadas con un lanzallamas y misiles, sino que también pueden combinarse para crear la Combined Pilaf Machine.
En un aparente intento por alcanzar a Pilaf, Japón ha experimentado recientemente un rápido desarrollo de robots pilotables. Un ejemplo notable es el ARCHAX, anunciado por Tsubame Industries en 2023.
.jpg?_=1785667800)
El sorprendente robot de 4,5 metros de alto y 3,5 toneladas métricas se puede controlar con joysticks y pedales e incluso es capaz de transformarse en un "modo vehículo" de cuatro ruedas. ¡Es como ver un anime de mechas cobrar vida! ¿El precio, te preguntarás? ¡La asombrosa cifra de 400 millones de yenes!
En esta entrevista, hablaremos sobre las especificaciones de las Pilaf Máquinas con el director ejecutivo de la empresa que desarrolló ARCHAX. Profundizaremos en la serie, haremos referencia a la escena en la que aparecen las Pilaf Máquinas y analizaremos la viabilidad de un "robot combinador".
.jpg?_=1785667800)
Ryo Yoshida: director ejecutivo de Tsubame Industries Co., Ltd. Nació en 1998 en la prefectura de Kanagawa. Influenciado por su abuelo, que dirigía una siderúrgica, se familiarizó con las máquinas desde muy joven y estudió tecnología de manos robóticas cuando era estudiante. Fundó ALTs, una empresa que fabrica manos protésicas mioeléctricas en 2019, cuando todavía era estudiante. Decidió perseguir su antiguo sueño de crear un robot gigante mientras trabajaba también como desarrollador. Fundó Tsubame Industries en agosto de 2021.
—Señor Yoshida, como alguien con experiencia en el desarrollo de robots pilotables, me gustaría preguntarle qué piensa sobre la apariencia y la funcionalidad de la Máquina Pilaf .
Ryo Yoshida (en adelante Yoshida): Mi impresión inicial fue que pensé queLas piernas se ven muy delgadas. Si las piernas sostienen un cuerpo equipado con armas como misiles y lanzallamas, el material utilizado en el exterior debe ser extremadamente fino y ligero. Sin embargo, cuando es lanzado hacia atrás por algún tipo de ataque, el cuerpo en sí no sufre ningún daño, lo que significa que el material también debe ser muy duradero.
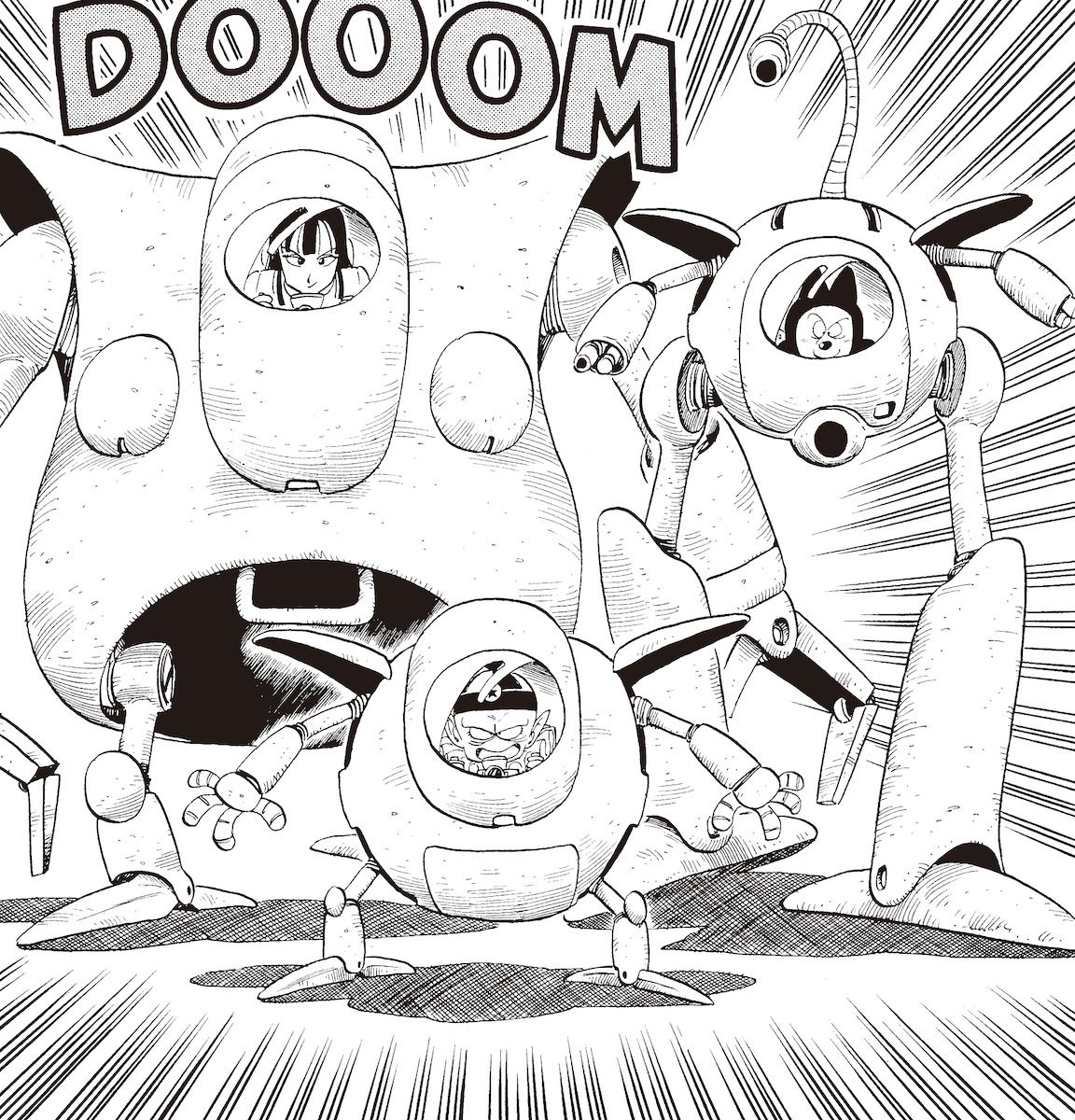
Una Pilaf Machine con sus características patas delgadas.
Dudo que hayaun material tan ligero y duradero que existe en la Tierra actualmente.Pienso que la Pilaf Machine debe estar hecha con algún material del que ni siquiera conocemos.
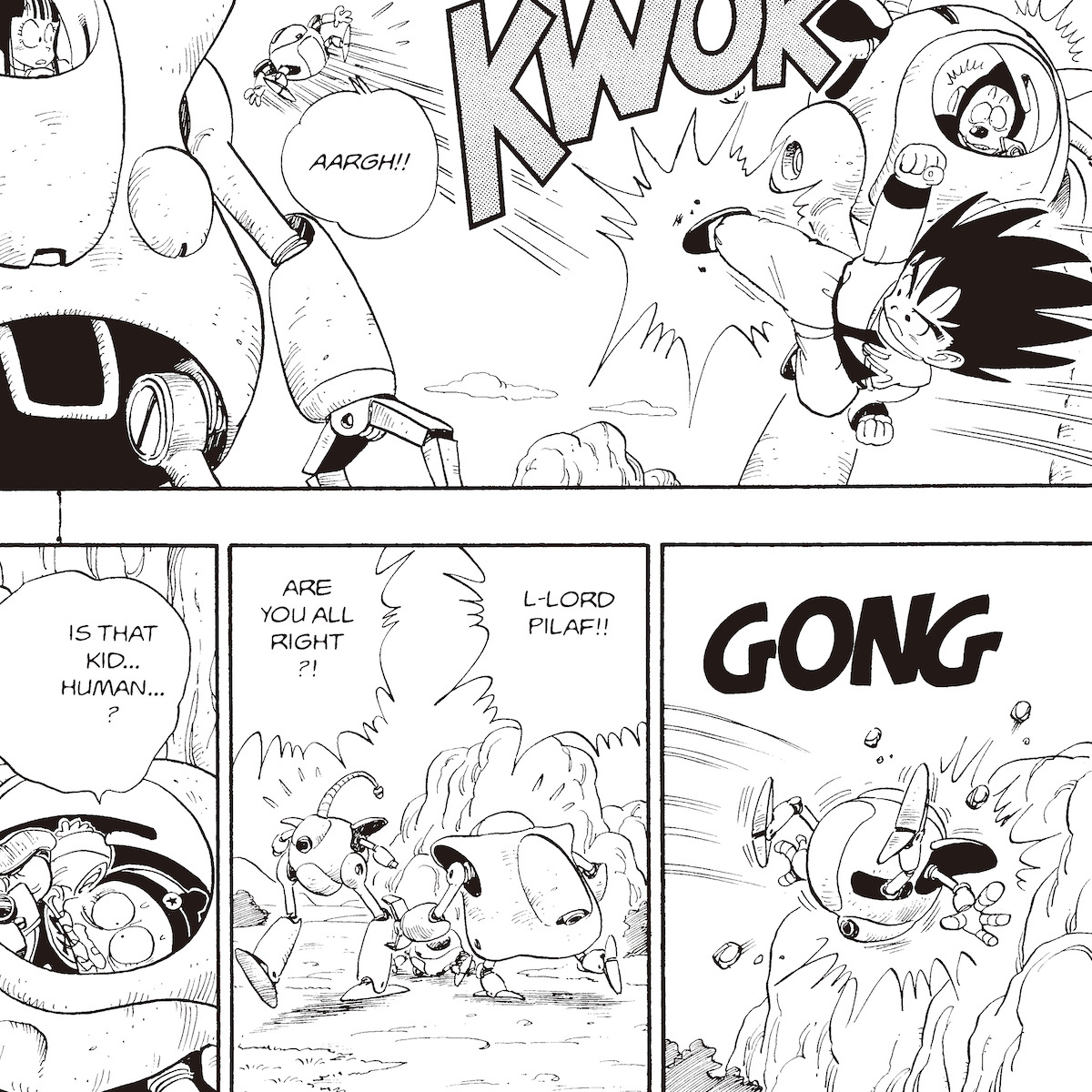
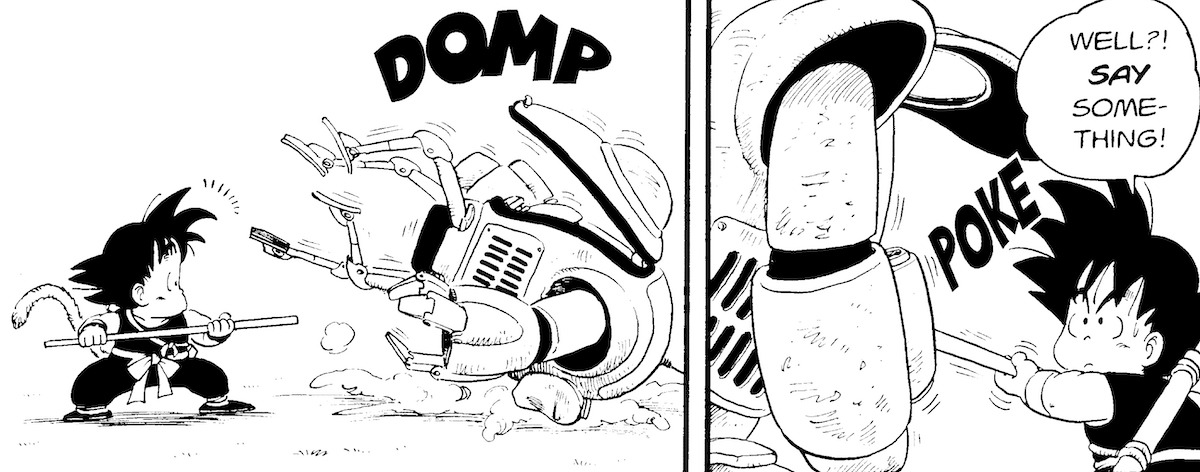
La Pilaf Machine no se rompe ni siquiera después de una patada de Goku.
—Eso tiene sentido. Si no fuera ligero, entonces no habría forma de que esas delgadas piernas pudieran sostener ese cuerpo.
Yoshida:Las dificultades de construir un robot radican precisamente enCómo controlar su pesoAl duplicar la altura, la sección transversal se cuadruplica y el volumen se multiplica por ocho, por lo que el peso aumenta proporcionalmente. Dado que el ARCHAX pesa 3,5 toneladas métricas, soportar tanto peso sobre solo dos piernas supondría una tensión increíble para ellas. Además, como priorizamos la seguridad del piloto por encima de todo, tenemos que asegurarnos de que no se vuelque. Si un ARCHAX de 4,5 metros de altura se cayera, sería tan peligroso como si volcara un camión pesado.
—¿Y qué tal su diseño? El ARCHAX tiene un diseño muy afilado y angular en comparación con la forma redondeada de las Máquinas Pilaf .
Yoshida:Un método de diseño llamadooptimización de topologíaRecientemente ha surgido un método matemático basado en computadora que calcula automáticamente la forma en que se debe organizar el material para crear la estructura más optimizada. Con este método, es posible producir un diseño redondeado y aerodinámico como este.
.jpg?_=1785667800)
Un diseño creado mediante optimización de topología.
—La superficie parece más redondeada, a diferencia de los robots típicos.
Yoshida:Con este diseño, también se garantiza una durabilidad adecuada. La mayoría de las máquinas actuales, incluidos los robots, están diseñadas con superficies angulares y planas. Esto se debe a las limitaciones técnicas y materiales que dificultan la creación de curvas. Pero este tipo de diseño a menudo da como resultado un peso innecesario y una durabilidad excesiva. Por otro lado, los diseños optimizados con IA eliminan esos aspectos innecesarios y excesivos. Se podría decir que el diseño se acerca más al de un organismo vivo.
—La redondez de las Máquinas de Pilaf parece casi orgánica. Si lo piensas, los cuerpos de los seres vivos tienden a estar diseñados de una manera muy lógica.
Yoshida:Exactamente. El diseño de las Máquinas de Pilaf puede ser El resultado de una optimización exhaustiva.
Hablando de organismos vivos, una cosa que me llamó la atención de las Pilaf Máquinas fue su campo de visión. Los humanos, mientras caminan, inconscientemente revisan su entorno para ver si hay seguridad. Esta es una de las razones por las que mirar el teléfono mientras caminas aumenta la probabilidad de tropezar. Lo entenderás de inmediato mientras conduces el ARCHAX, ya que comenzarás a sentirte ansioso y pensarás "¿Hay algo detrás de mí? ¿Debajo de mí?". Es por eso que garantizar un campo de visión adecuado es crucial en el desarrollo de este tipo de robots pilotables. Sin embargo, a simple vista, parece que los campos de visión de las Pilaf Máquinas se basan únicamente en la ventana frontal, sin la ayuda de ninguna cámara externa. Tengo curiosidad por saber cómo garantiza la visibilidad trasera.
El ARCHAX, por cierto, está equipado con nueve cámaras externas.
—Ya veo. Sería fundamental garantizar un campo de visión adecuado para operar con fluidez un robot, ¿no? Además, he observado que las Máquinas Pilaf se accionan mediante palanca, pero ¿es esta una característica compartida con el ARCHAX?
Las Máquinas de Pilaf parecen funcionar con palanca.
Yoshida:Las Máquinas de Pilaf parecen funcionar mediante palancas, Sin embargo, realizar movimientos complejos únicamente con palanca es extremadamente difícil.En general, las palancas pueden controlar dos propiedades: "posición" y "velocidad". Los movimientos más finos requerirían un control más preciso de la presión y el ángulo de la palanca. Sería difícil reproducir movimientos similares a los humanos, como agarrar objetos, utilizando operaciones con palancas.
—La máquina que conduce Pilaf puede señalar con su dedo índice, lo que sugiere que es capaz de realizar movimientos bastante precisos.
Yoshida:El ARCHAX también tiene cinco dedos, lo que le permite realizar diferentes acciones, como hacer el signo de la paz u otras poses preestablecidas mediante la operación de un botón.
.jpg?_=1785667800)
Una vez que te acostumbres a controlar el ARCHAX, podrás mover tus dedos con mayor precisión.
Sin embargo, a diferencia de los humanos, no es capaz de crear patrones ilimitados. En ese sentido, las máquinas de Pilaf exhiben movimientos bastante similar a los humanos, como cuando abre la mano cuando se sorprende. Es posible que la máquina emplee tecnología del futuro, como algún tipo de conexión neuronal (nota del editor: un sistema que vincula el cerebro del piloto con el robot, lo que permite controlarlo mediante ondas cerebrales), lo que permite movimientos que se asemejan mucho a la intención humana.
—Las tres Máquinas de Pilaf pueden combinarse entre sí para crear la Pilaf Machine combinada. ¿Hubo algo que te llamó la atención sobre esta habilidad?
Yoshida:Como diseñador de robots no pude evitar preguntarme:Si hay tres pilotos, ¿cómo se reparten los controles?? Por ejemplo, en los aviones de pasajeros con varios operadores, existe un sistema claramente definido para indicar al capitán y al copiloto de qué están a cargo en cada momento. Una vez que las Máquinas de Pilaf se han unido, la máquina del emperador Pilaf se convierte en la cabeza, por lo que quizás Pilaf esté a cargo de los controles, pero los otros dos también pueden tener un grado limitado de control.
¿Está el Emperor Pilaf a cargo de los controles de la Máquina Pilaf Combinada?
—¿Crees que es como un sistema donde los otros dos pilotos pueden asumir el control si hay un problema con la cabeza del robot?
Yoshida: Ciertamente, es una posibilidad. Creo que en una situación así, el control se transferiría automáticamente a los demás pilotos. El ARCHAX, por ejemplo, puede ser controlado tanto por el piloto en la cabina como a través de un sistema de control remoto. Sin embargo, el control solo puede transferirse desde dentro de la cabina para evitar que alguien asuma el control del ARCHAX desde fuera mientras todavía hay un piloto dentro.
—La estructura de la Pilaf Machine combinada también me da curiosidad. Cuando se combinan, las patas del gran robot del centro se pliegan hacia dentro, por lo que debe haber mucho espacio libre dentro de su cuerpo. Pero ¿dejaría esto lugar para una fuente de energía?
Yoshida:Es posible que en el mundo de Dragon Ball Se ha producido un avance significativo en la miniaturización de los paquetes de energía y las baterías.Incluso en nuestro propio mundo, podemos ver baterías para distintos tipos de dispositivos cada vez más pequeñas. Pero, por supuesto, la historia es completamente diferente cuando se trata de armamento. El robot con patas largas también usa misiles, y es una maravilla dónde guarda todo eso dentro de ese cuerpo.
—El de patas largas también tiene un lanzallamas, por lo que debe estar almacenando acelerantes como pólvora y explosivos en algún lugar.
Yoshida: Sí, la boquilla de ese lanzallamas actúa como un conector cuando los robots se combinan, por lo que es una pieza vital del equipo. También se mueve como una cola o un cuello, así que me pregunto si se controla con pensamientos a través de algún tipo de conexión neuronal...
—¿Es posible “combinar robots” con nuestra tecnología actual?
Yoshida: Para que un robot pueda unirse de esta manera, tiene que haber...Una razón detrás de su combinación en primer lugarEl robot será considerablemente más pesado después de la combinación y las características de seguridad serán más difíciles de implementar. Aunque luego volveremos a la cuestión de si es necesario o no que las personas viajen dentro de los robots en primer lugar... (risas).
—Dejando de lado la necesidad, en última instancia estás haciendo el ARCHAX porque quieres viajar dentro de un robot, ¿verdad?
Yoshida:Oh, por supuesto. Y me imagino que el Emperor Pilaf tenía un deseo similar de pilotar un robot. Quiero decir, el mundo de Dragon Ball está lleno de tecnología avanzada, por lo que debe haber muchas armas robóticas no tripuladas entre las que podría elegir. No hay ninguna razón lógica para entrar en un robot armado y pilotarlo cuando se considera el riesgo de sufrir lesiones o morir. Entonces, a Pilaf definitivamente le encantan los robots (risas)Creo que me llevaría bien con él.Me encantaría hablar con él y preguntarle qué sistema operativo usa o discutir diseños conceptuales..
.jpg?_=1785667800)
Yoshida cree que se llevaría bien con Pilaf.
—¿Entonces crees que Pilaf soñaba con pilotar un robot, como lo hacen muchos humanos?
Yoshida:Creo que sí. Hoy en día, incluso muchos equipos de construcción, como las excavadoras, se pueden controlar de forma remota, y la tecnología de realidad virtual y de inteligencia artificial seguirá mejorando. Creo que nos estamos acercando a una era en la que todo lo que hacen los humanos lo podrán hacer los robots. Y cuando esto suceda, se cuestionará la idea de la identidad humana y la gente podrá contemplar con renovado interés el simple placer de conducir y pilotar una máquina.
—Sí, puede que se le dé valor a cosas que no son exactamente racionales. Combinar robots es genial, y la forma en que Pilaf diseñó su propio robot, que también pilotea, parece una forma en que la gente podría responder contra la automatización de la IA en el futuro.
Yoshida:Sí, creo que sí. Por ejemplo, yo conduzco un coche manual, aunque sé que ahora que los automáticos son la norma, no tiene sentido hacerlo. Me encanta la sensación táctil que me da cambiar de marcha yo mismo.
.jpg?_=1785667800)
—No es sorprendente escuchar eso de alguien que está fabricando su propio robot pilotable (risas).
—¿Cuál fue su razón original para querer hacer un robot pilotable?
Yoshida: Mi razonamiento fue simple: pensé que sería divertido. En otra empresa que fundé (ALTs), estaba diseñando brazos protésicos que se podían controlar con movimientos musculares sutiles. Además, siempre me han gustado los robots, ¡y todo podría deberse a medios como Dragon Ball!
Actualmente estoy en proceso de planificación de un parque temático de robots, con el objetivo de abrir en 2027. En este parque temático, quiero que los visitantes puedan montar robots, participar en simulaciones de rescate de desastres y jugar juegos similares a deportes. Creo que gran parte del mundo identifica a los robots con la cultura japonesa, por lo que me gustaría que el parque también promoviera este lado de la cultura japonesa. Lo que buscamos no es ciencia ficción, sino "ciencia real", llevando lo imaginario al mundo real.
—¡Nos encantaría ver robots combinables como la Pilaf Machine!
Yoshida: Siempre y cuando podamos obtener autorización de seguridad (risas).
Entrevistador/Escritor: Hotaka Sugimoto
Fotografía: Kayo Sekiguchi
Este sitio web contiene textos traducidos con traductor automático. Es posible que algunas palabras o expresiones sean difíciles de comprender.